
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- CES2021
- 코로나백신대상
- 드론배송시작
- 자율주행
- 코로나백신
- 우버 매각
- 김래아
- UAM사례
- 자율주행차량
- 월마트드론
- 자율주행택시
- 로보택시
- 오로라자율주행
- 로봇택시
- 해외UAM
- 우버자율주행
- 아마존자율주행
- UAMT
- 오로라이노베이션
- 자율주행오로라
- 6G
- 기술경영
- CES2021LG
- Starlink
- 완전자율주행
- 코로나백신피해야할대상
- smart_city
- 스마트시티
- UAM
- 에어택시
- Today
- Total
RDX 공식블로그
자율주행 보트로 상품과 서비스 제공하는 시대의 개막 본문
안전하고 빠른 자율 주행 자동차를 생산하기 위한 경쟁이 휠체어, 스쿠터, 심지어 골프 카트까지 퍼져 나갔다. 최근에는 해양 자율성이 도시의 운하를 변화시키고 수로를 가로 질러 상품과 서비스를 제공하고 쓰레기를 수거할 수 있는 잠재력을 가지고 있어 시장이 육지에서 바다로까지 뻗어 나가고 있다.
MIT의 컴퓨터 과학 및 인공 지능 연구소 (CSAIL)와 Senseable City Lab의 프로젝트에 참여한 연구원들은 네덜란드 암스테르담을 위한 세계 최초의 자율 보트를 개발했다, "Roboat II"는 2m 길이로 승객을 태울 수 있다. 암스테르담 첨단 메트로폴리탄 솔루션 연구소와 함께 보트 간의 통신 및 협업을 업데이트하기 위한 탐색 및 제어 알고리즘도 만들었다.
Roboat 논문의 선임 저자이자 CSAIL의 MIT 교수인 Daniela Rus는“Roboat II는 자율 주행 자동차에 사용되는 것과 유사한 알고리즘을 사용하여 자율적으로 탐색하지만 물에서 주행합니다. 우리는 사람과 물품을 배달하고 다른 Roboats와 연결하여 수상 활동을 가능하게 하는 다양한 자율 플랫폼을 형성할 수 있는 Roboats를 개발하고 있습니다." 라고 전했다.
강력한 알고리즘의 도움을 받아 Roboat II는 데이터를 수집하여 3시간 동안 암스테르담의 운하를 자율적으로 탐색한 후 0.17 미터 미만의 오차 범위로 시작 위치로 돌아왔다. Roboat 논문의 수석 저자인 Wei Wang “정확한 매핑, 강력한 제어 및 사람 운송이 가능한 자율 보트 시스템의 개발은 본격적인 Roboat에서 시스템을 구현하기위한 중요한 단계입니다. 우리는 또한 그것이 자율적으로 만들어져 결국 다른 보트에도 구현되기를 희망합니다." 라고 말했다.
보트 간의 커뮤니케이션을 조정하기 위해 Wang이 이끄는 MIT CSAIL 및 Senseable City Lab의 또 다른 팀은 로봇 조정을 위한 새로운 제어 전략을 고안했다. 어린 이용 기차 세트에서 아이디어를 얻어 유닛으로 연결된 기차로 집단 운송을 가능케 한다. 이 시스템은 개미 군집이 통신없이 음식을 운반할 수 있는 방법에서 영감을 받아 센서, 컨트롤러 및 시스템 전체에 분산된 컨트롤러를 사용한다. 즉 연결된 로봇 간에 직접적인 통신이 없다. 여러 유닛 중 리더유닛만 목적지를 알고 있어 리더가 목적지까지 이동을 시작하면 다른 로봇이 리더의 의도를 추정하고 그에 따라 이동을 정렬한다.
Senseable City Lab 디렉터 인 Ratti는 “현재의 협력 알고리즘은 물 위의 동적 시스템을 거의 고려하지 않았습니다. 수상 협력 운송은 항공 또는 지상 차량에서 발생하지 않는 독특한 문제가 있습니다. 예를 들어 차량의 관성과 부하는 시스템을 제어하기 어렵게 만드는 더 중요한 요소가 됩니다. 우리의 연구는 지상 차량의 협력 제어를 조사하고 그것에 대한 알고리즘을 검증합니다.” 라고 전했다.
팀은 두 가지 시나리오에서 제어 방법을 테스트했다. 하나는 세 개의 로봇이 직렬로 연결되고 다른 하나는 세 개의 로봇이 병렬로 연결된 것이었다. 결과는 두 그룹 모두 다양한 궤적과 방향을 추적할 수 있었고 리더를 따르는 유닛의 힘의 크기가 그룹에 긍정적으로 기여했음을 보여주었다.
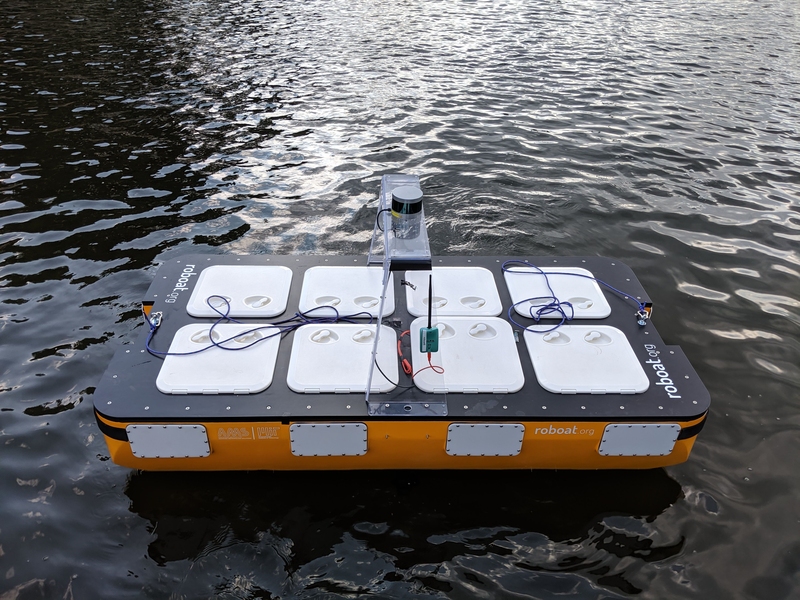
Roboat II
Roboat II는 업데이트된 연구를 통해 운송 작업을 탐색하기 위해 확장되었다. 여기에는 SLAM (Simultaneous Localization and Mapping)을 위한 새로운 알고리즘, 비선형 모델 예측 컨트롤러인 모델 기반 최적 컨트롤러, 이동 지평선 추정을 위한 최적화 기반 상태 추정기가 포함된다.
작동 방식은 특정 위치에 있는 사용자의 픽업 작업이 필요한 경우 시스템 코디네이터는 승객과 가장 가까운 비어있는 보트에 작업을 할당한다. Roboat II가 승객을 태우면 현재 교통 상황에 따라 원하는 목적지까지 가능한 경로가 생성된다.
그런 다음 무게가 50kg 이상인 Roboat II는 SLAM 알고리즘을 실행하고 LIDAR 및 GPS 센서는 물론 위치 파악, 속도를 위한 관성 측정 장치를 활용하여 위치 파악을 시작한다. 그런 다음 컨트롤러는 참조 궤적을 추적하여 감지된 장애물을 피하기 위해 경로를 업데이트한다. SLAM 알고리즘은 Roboat에 대해 더 높은 지형 정확도를 제공하고 탐색 중 온라인 매핑을 가능케 한다.
그럼에도 불구하고 수로의 까다로운 시나리오가 여전히 남아있다. 이에 팀은 Roboat의 환경에 대한 이해를 향상시키기 위해 능동적 물체 감지 및 식별을 적용하여 보트가 더 복잡한 시나리오를 처리할 수 있도록 계획 알고리즘을 개발하는 작업을 하고 있다. 팀은 추적 성능을 향상시키기 위해 해류 및 파도와 같은 교란을 테스트에 추가할 계획이다.
Rus는 예상되는 모든 개발은 본격적인 Roboat의 첫 번째 프로토 타입에 통합되고 암스테르담시 운하에서 테스트될 것이라고 밝혔다.
집단 운송
이 프로젝트의 주요 목표 중 하나는 자체 조립을 통해 폐기물 수거, 물품 배달, 운하에서 사람 수송 등의 작업을 완료할 수 있도록 하는 것이다. 하지만 물 위에서 이러한 움직임을 제어하는 것이 어려워 로봇 공학의 통신은 종종 불안정하거나 지연되어 로봇 조정을 악화시킬 수 있다.
이 집단 운송을 위한 제어 알고리즘은 직접적인 커뮤니케이션, 즉 그룹 내 상대 위치 및 작업의 목적지를 필요로 하지만 팀의 새로운 알고리즘은 원하는 궤적과 방향을 알기 위해 로봇 하나만 있어도 된다.
일반적으로 각 로봇에서 실행되는 분산 컨트롤러에는 연결된 구조의 속도 정보(구조물 중심의 속도로 표시됨)가 필요하지만 이를 위해서는 각 로봇이 구조 중심에 대한 상대 위치를 알고 있어야한다. 팀의 알고리즘에서는 상대 위치가 필요하지 않으며 각 로봇은 구조 중심의 속도 대신 로컬 속도를 사용한다.
리더가 목적지까지 이동을 시작하면 다른 로봇이 리더의 의도를 추정하고 이동을 정렬할 수 있다. 리더는 두 로봇 간의 통신없이 나머지 로봇을 조종할 수도 있다.
앞으로 팀은 러닝머신을 사용하여 로봇의 주요 매개 변수를 추정할 계획이다. 또한 물체가 보트에 배치 될 때 구조를 동적으로 변경할 수 있는 적응형 컨트롤러를 탐색하는 것을 목표로 한다. 즉 보트를 해류 및 파도와 같은 큰 교란이 존재하는 야외 수중 환경으로 사용을 확장할 것이다.
[영상]: https://youtu.be/OYmVwvP_pD0
[출처]: news.mit.edu/2020/autonomous-boats-could-be-your-next-ride-1026
Autonomous boats could be your next ride
Roboat II is a self-driving, passenger-carrying boat in development for use in the canals of Amsterdam. Work on these autonomous vehicles is led by Daniela Rus of MIT CSAIL and Carlo Ratti of the MIT Senseable City Lab.
news.mit.edu
Editor Susan
'Tech.News' 카테고리의 다른 글
| 커넥티드카 및 자율주행 차량의 데이터 관리를 위한 퓨전 프로젝트 착수 (0) | 2021.02.09 |
|---|---|
| 현대와 애플의 자율주행차량 프로젝트 파트너십 체결 (0) | 2021.02.04 |
| 인텔 자회사 무빗, 글로벌 대중교통 보고서 2020 발간 (0) | 2021.02.02 |
| 전기차 충전에 5분밖에 걸리지 않는 기술 개발 성공.. 전기차 배터리의 미래는? (0) | 2021.02.01 |
| New Flyer의 레벨4 자율 전기 교통 버스, 2022년부터 테스트 시작 (0) | 2021.02.01 |



