
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- 드론배송시작
- 기술경영
- 완전자율주행
- UAM
- 해외UAM
- UAM사례
- CES2021LG
- 6G
- 자율주행오로라
- 아마존자율주행
- 우버자율주행
- UAMT
- CES2021
- 오로라자율주행
- 로봇택시
- 코로나백신피해야할대상
- 에어택시
- 코로나백신
- 로보택시
- smart_city
- 김래아
- 오로라이노베이션
- 자율주행택시
- 스마트시티
- 자율주행
- Starlink
- 월마트드론
- 우버 매각
- 코로나백신대상
- 자율주행차량
- Today
- Total
RDX 공식블로그
성공적인 로보택시 제공을 위한 6가지 고려사항 본문
(2020.09.07.) 일각에서는 2018년 로봇택시 경쟁이 정점이었다고 평가한다. 하지만 COVID-19는 많은 사람들에게 더 안전하고 운전자 없는 이동성의 정의를 다시 생각하게 만들었다. 전 세계적으로 COVID-19의 영향이 지속 되고 있는 가운데, 각국의 대중교통과 승차공유 이용객은 급격히 감소했고, 그 이후 상승세(예: 우버가 홍콩에서 80%정도를 회복했다고 보도하는 등)도 있었지만, 여전히 완전히 회복되지 않고 있다. 운전자와 승객 사이의 엄격한 마스크 규칙과 보호 스크린을 대신하여 무인 자동차 기술은 승차 간 차량의 청결성에 대한 문제가 남아 있지만, 운전자를 없앰으로써 문제의 일부를 해결할 수 있다.
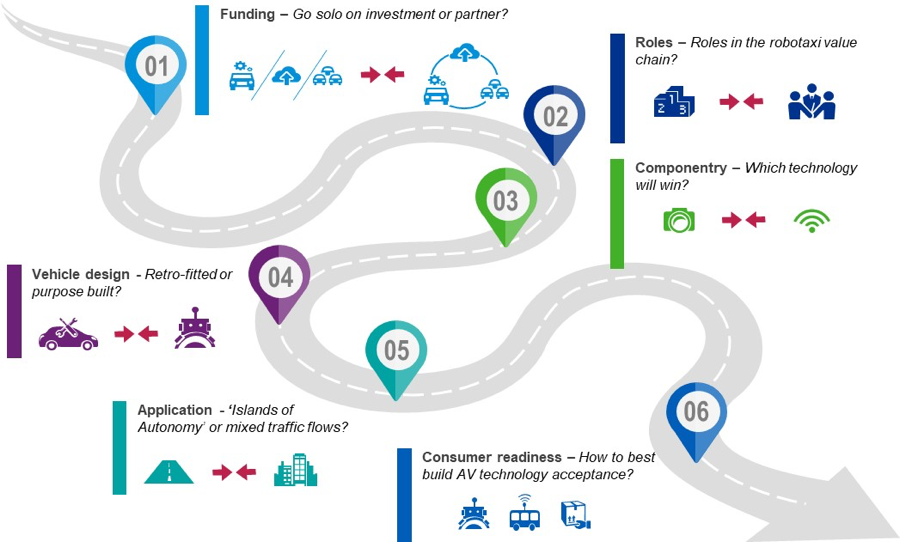
가장 큰 비용 요소 중 하나인 운전자를 없애면 로보택시 모델은 마일당 비용을 최대 40%까지 절감할 수 있을 것으로 예상된다. 그러나 로봇 택시 상용화 출시는 예상보다 더 어려운 것으로 입증되었다. 제공자가 설득력 있는 로보택시 오퍼링을 개발하려면 자금 조달 구조에서부터 배치 전략에 이르기까지 로보택시 개발에 대해 6가지 핵심 결정을 내려야 한다.

1. 투자자 또는 파트너 설정
자율주행차 기술은 매우 비싸다. 지난 5년 동안 450억 달러가 넘는 돈이 AV 관련 기업에만 투자되었다. 플레이어는 복잡한 차량 하드웨어(예: 센서) 및 소프트웨어(예: 매핑 데이터)에 대한 투자와 함께 AV를 더 넓은 전송 네트워크에 통합하는 것도 고려해야 한다. 이를 위해서는 연구개발, 시험, 규제승인, 생산 및 서비스 개발에 대한 투자가 필요하다. 그러므로 첫 번 째 결정은 독점적 이익을 얻기 위한 독점 솔루션 개발을 할 것인지의 여부이다. 자동차 회사들은 시장의 증가하는 재정적인 부담과 소프트웨어 역량이 부족하기 때문에 현 단계에서는 단독 개발이 어려운 실정이다. 프랑스와 일본에서 Transportation-as-a-Service를 모색하기 위한 웨이모-레노-닛산 파트너십 등 많은 이들이 투자자나 파트너의 컨소시엄을 구성하고 부담을 분담하는 추세이다. 상당한 현금을 보유하고 있는 플레이어들은 발전 가능성이 가장 높지만 모빌리티가 핵심이 아닌 투자 포트폴리오를 감안할 때 많은 기업들은 OEM 파트너십을 활용하여 하드웨어와 생산 능력을 활용했다.
2. 로보택시 밸류체인 역할을 할 것인가
복잡한 기술에 대한 의존도가 높기 때문에 로보택시 밸류체인의 역학관계는 오늘날 우리가 알고 있는 자동차 밸류체인과는 확연히 다를 것이다. 미래의 로보택시 회사는 차량 소싱과 운영을 포함한 로보택시 관리, 고객 서비스, 인프라 구축 및 사용, 위험 관리 및 보험 등 많은 역량에 대한 접근을 요구할 것이다. 로보택시는 누가 소유할 것이며 이것이 밸류체인의 플레이어가 될 것인지 아니면 로보택시가 새로운 자산군이 될 수 있을 것인가?
하나의 플레이어나 부문에서만 솔루션 개발하기는 어려울 것이다. 위험성과 투자 요구의 균형을 맞추기 위해 부문 간 협업이 필요하지만 역량, 자산 등이 어디에 위치하는지에 따라 결정될 것이다. 런던 내 앱 기반 승차 공유 서비스를 도입한 AV 택시 Project Apollo는 부문간 협력의 한 사례이다.
기존의 OEM 기업들은 100년이 지난 비즈니스 모델에 대한 압박감으로 새로운 가치흐름에 접근하고자 한다. 그들은 또한 효율적이고 규모에 맞는 차량을 설계하고 제조할 준비되어있다. 그러나 OEM 업체들은 상품화의 장기적인 위험을 알고 있으며 차량 하드웨어를 넘어서는 플레이도 모색하고 있다. AV 소프트웨어에서 BMW가 인텔·모빌아이와 제휴한 것이 이에 해당된다.
OEM 기업들이 로보택시 밸류체인을 형성하지 않을 것이며 지분 획득을 위해 힘든 싸움을 해야할 것이다. 일반적으로 빠르게 성장하고 있는 현금 자본이 풍부한 애플이나 디디추싱과 같은 플레이어들의 투자와 경쟁한다. 테슬라와 같은 새로운 OEM 업체들도 과거의 레거시과제에 부딪히지 않기 때문에 경쟁이 될 수 있다. 반면 택시나 렌탈 회사들은 기존의 역량에 기초하여 밸류체인의 서비스 제공 부문과 로보택시 경영에 박차를 가할 것이다.
3. 라이다와 카메라 기술 선택
초기 개발 단계에 AV 기술이 등장하면서, 어떤 형식이 시연 단계를 성공적으로 탐색하고 결국 배치에서 승리할 것인지에 대한 의문이 자연스레 생겨났다. 많은 기술적 요소들이 작용하고 있지만 가장 논쟁이 되는 기술 중 하나는 이미징 기술, 즉 라이다와 카메라 사이의 결정이다.
라이다는 장거리 정확도, 해상도, 어려운 기상 조건에서도 성능이 뛰어나지만, 개발 비용이 여전히 높다. 이와는 대조적으로, 카메라 기술은 값이 싸고 색상을 포착할 수 있지만(신호등 신호를 생각할 수 있지만), 거리 측정에는 적합하지 않고, 조명 상태가 좋지 않을 때 부진하며, 상당한 컴퓨팅 파워를 필요로 한다. 테슬라는 라이다 기술을 사용하지 않으며 다른 유명 플레이어(예: 웨이모, 바이두)는 대부분 라이다와 카메라를 AV 개발에 결합해 사용했다. 한 가지 기술이 아직 성공할지 모르지만, 현 단계에서는 두 기술의 조합이 새로운 해결책인 것 같다.
4. 개조된 제품과 목적에 맞게 제조된 제품간의 선택
또 다른 중요한 결정은 기존 차량 모델과 설계를 AV에 사용할 것인지 아니면 무인 차량 여정에 더 적합한 완전히 새로운 디자인을 도입할 것인지 하는 것이다. 세 가지 시나리오가 유력하다.
옵션 1은 기존 차량을 AV 부품, 소프트웨어 및 인테리어로 개조하는 것이다. 개조는 기술이 초기 단계에 있을 때 가장 흔하며, 일반적으로 제3자뿐 아니라 이 경우 OEM과 기술 제공업체가 수행한다. OEM의 경우 이는 기존 제조 공정에 거의 변화가 없음을 의미하며, 기술 제공업체는 제조 업체와 독립적으로 그들의 제품을 조정할 수 있는 유연성을 보유한다.
옵션 2는 기존 차량 설계에 AV 기능을 구축하는 것을 의미한다. AV 기능은 차량 설계 및 제조에 통합되어 있지만 내부 디자인은 대부분 운전자에게 초점을 맞추고 있다. OEM이 AV 기술 전환 시간 동안 자사 제품을 사용할 수 있도록 보장하기 위해 기술 확장을 결정함에 따라 다음 단계가 될 것이다. 연구개발과 공급망 비용이 발생하겠지만 옵션 3보다는 낮을 가능성이 높다.
옵션3는 처음부터 특수 제작된 로보택시 모델을 볼 수 있다. 특히 비 OEM 기업의 경우 레거시 공급망과 자본 부족을 고려한다면 첫 번 째 원칙에서 차량을 설계하는 것이 더 타당하다. 승객 중심으로 설계된 내부와 더 높은 용량의 공유 이동성을 가지고 있다. 문제는 완전히 새로운 설계에 대한 추가 안전 시험과 규제 승인, 그리고 더 높은 개발 비용을 포함하는 점이다. 시장이 더 커질때까지 실행가능한 선택이 아닐 것 같다.
5. 자율주행도로 또는 혼재된 도로
차량 관련 자율 기술로 큰 진전이 있었지만, AV를 도로망에 통합하는 것은 여전히 가장 큰 난제 중 하나로 남아 있다. 현재까지, 시험은 주로 영국의 MIRA와 같은 전용 시설이나 매핑하기 쉬운 지역(예: US grid-systems)에서 수행되었다. 이러한 시험들은 계속 진행되어야 하며, 기술의 통합을 진정으로 테스트하기 위해서는 트래픽 밀도가 높은 영역에 점점 더 많이 있어야 할 것이다.
장기적으로는 AV가 비자율주행교통과 안전하게 혼합할 수 있는 기능이 확실히 필요할 것이다. 그러나 승객 자율주행의 최초 발표가 도시의 특정 구역과 같은 제한된 지리적 구역으로 제한되거나 비 자율주행 교통으로부터 완전히 격리될 수 있는지에 대해서는 의문이 제기된다. 바이두의 지원을 받은 아폴로 로보택시는 4월에 주거, 산업, 상업 지역을 가로질러 창사 일반 대중에게 서비스를 제공하기 시작했다. 이러한 예는 일부 복합적인 도시 환경에서 로봇 택시의 가능성을 보여준다.
6. 기술 허용성을 확보하는 방법
로보택시의 성공은 자율주행기술에 달려 있지만 무엇보다 안정적인 배치를 위해서는 인적 요인이 중요하다. 자발적인 운전자, 우호적인 규제 계획, 그리고 그 구역을 공유하는 사람들의 협력이 없다면 로보택시 모델을 실패할 것이다.
안전성 우려는 필수이며(특히 이전의 치명적 사고에 해당) 광범위한 실제 테스트, 새로운 시뮬레이션 기술 및 사용자 피드백이 이러한 우려를 극복하는 데 도움이 될 것이다. 규제 당국은 테스트와 실험의 여지를 허용하는 한편, 대중의 신뢰를 얻기 위한 새로운 면허 기준과 책임을 제정하는 역할을 한다. 그러나 먼저 다른 활용 사례로 자율주행기술을 도입해보는 것도 방법이 될 수 있다. 예를 들어, 자율주행 배달 또는 철도 셔틀 서비스는 더 쉬운 경로를 제공할 것이다.
사용자 경험 고려사항 또한 중요하며 로보택시 기술 수용을 위해 숙고해야 한다. 승객들은 소수의 인원만으로 가까운 픽업과 하차 옵션(예: 라스베가스 Lyft사 테스트 같은)만으로 만족할까? 사용자는 전용 인테리어(예: 업무 및 여가 여정)를 기대할 것인가? 그리고 그것이 얼마나 실현 가능한가? 차량 내 퍼스널 어씨스턴트 기술이 택시 기사의 현지 지식을 대체할 수 있는가?
성공적인 로보택시 개발 방안
이러한 결정사항을 고려할 때 우수한 로보택시의 모델을 어떤 모습일까? 실제로 여러 로보택시 원형이 다른 결정과 특정 지역 시장 상황에 기반하여 가까운 미래에 진화할 가능성이 높다. 다음은 원형의 예시들이다.
• Retro-fitted ride-hailing fleets : 기술 플레이어/라이드헤일링 플랫폼이 AV 기술을 OEM 파트너사에 추가하여 통합 라이드헤일링 및 배송 서비스를 제공한다. 기술 플레이어들의 대규모 자산에서 자금을 조달할 가능성이 높지만 파트너사들의 잠재적 이익배분 옵션을 가지고 있다.
• 통합 OEM 모빌리티 서비스 : 일부 OEM은 드라이버 어시스트 기능으로 모델에 통합된 레벨 4 AV 기술을 사용한 브랜드화된 라이드헤일링 플팻폼을 출시하여 대부분의 엔드투엔드 방식의 밸류체인을 제어한다.
• 자율 대중 교통 : 목적에 맞게 구축된 AV는 일반 버스 시간표를 대체하기 위해 동적 경로를 사용하는 수요 대응형 운송 계획의 일부로서(대중 운송 회사와 협력 또는 경쟁하면서) 대중 교통의 한 형태로 운영된다.
• AV 서비스형 관리 : 조달, 서비스, 유지보수 및 위험 관리를 포함한 전통적인 로보택시 관리 능력과 대규모 자산을 보유한 회사가 운영자를 위해 로보택시군을 관리하고 차량을 소유할 수도 있다. 이를 통해 운영자는 고객 경험에 집중할 수 있다.

또한 로보택시가 성공하기 위한 분명한 요건 외에도 몇 가지 전략적인 단계와 핵심 역량이 있다고 생각한다. 예를 들어, AV 및 로보택시 서비스에 대한 지속적인 테스트, 정부 및 규제 기관과의 참여 등이 있다.
AV 기술이 발전함에 따라, 로보택시의 미래는 개별 경쟁자들과 협력자들이 어떻게 개요에 나와 있는 결정들을 다루는지에 따라 달려 있을 것이다. 많은 접근법이 시도될 것이며, 점점 더 '협력 사이의 경쟁'이 표준화 될 것이다. 일단 서비스가 시작되면, 조직은 기술된 6가지 결정에 대한 방향을 평가하고 정해야 하며 전략적 단계와 핵심 기능에 초점을 맞추어야 한다.
[출처]
www.automotiveworld.com/articles/how-do-you-develop-a-successful-robotaxi-offer/
How do you develop a successful robotaxi offer? | Automotive World
Some say the ‘race for the robotaxi’ peaked in 2018, with developers since delaying their launch plans due to a range of technical, social and financial challenges. However, the novel coronavirus disease (COVID-19) has led many to reconsider the defini
www.automotiveworld.com
Edited by Lucy
'Tech.News' 카테고리의 다른 글
| 웨이모, COVID-19 대유행 동안에도 Fake City에서 자율주행차 테스트 (0) | 2020.09.15 |
|---|---|
| 테슬라에 도전하는 15만 달러의 전기자동차 Lucid Air (0) | 2020.09.15 |
| FEV, CAV 개발을 위한 Co-simulation의 선두주자 (0) | 2020.09.10 |
| 인간의 바디랭귀지를 학습하는 자율주행차 (0) | 2020.09.08 |
| 일본 자율주행 버스 테스트 얼굴 인식으로 결제 가능 (0) | 2020.09.07 |



